Mesurer une distance avec un objet connecté quel capteur choisir ?
Introduction
Dans le domaine des capteurs de distance, l’objectif principal est de déterminer à quelle distance se trouve une cible donnée.
La précision souhaitée varie selon les besoins : souhaite-t-on une mesure exacte au millimètre ou simplement une informations sur la proximité de l’objet, comme déterminer s’il est près ou loin ?
Dans certains cas, il peut suffire de savoir si la distance à un objet dépasse un seuil spécifique.
Il faut également prendre en compte les contraintes associées à chaque type de capteur. Par exemple, certains ne peuvent pas détecter les objets situés à moins de 5 cm ou à plus de 1 mètre. Cette considération est essentielle pour définir précisément nos exigences.
Pourquoi existe-t-il différents types de capteurs de distance ?
Dans les cas d’usage qui peuvent se présenter à nous, il est fréquent de devoir mesurer des distances pour en déduire une information.
Voici quelques exemples de conception dans lesquelles BLUEGRioT intègre des capteurs de distance :
- pour mesurer des taux de remplissage de cuve avec Lesaffre,
- pour détecter la présence d’un vêtement sous le cintre connecté,
- pour aider le robot d’enchanted tools à s’approcher d’un objet qu’il doit saisir,
Rien que pour ces trois exemples nous n’avons pas utilisé la même technologie, alors comment choisir la bonne ? Nous détaillons un peu plus dans la suite de l’article.



Infra-rouge ? Ultrason ? Sélectionner la technologie adéquate !
Effectivement, plusieurs méthodes permettent de déterminer la distance entre un objet et un capteur. Pour commencer, concentrons-nous sur l’approche la plus répandue (et probablement la plus adaptée 🤓 ) : la mesure du temps de vol
Explication du principe du temps de vol (Time-of-Flight)
Les capteurs de distance qui utilisent le principe du temps de vol, ou « Time-of-Flight » (ToF) en anglais, représentent une méthode sophistiquée et précise pour évaluer la distance entre le capteur et un objet ou obstacle.
Le fonctionnement de ces capteurs repose sur l’émission d’un signal, vers une cible. Lorsque ce signal atteint l’objet, il est réfléchi / renvoyé vers le capteur.
La clé de cette méthode réside dans la mesure du temps écoulé entre l’émission du signal et la réception de son écho.
Ce temps aller-retour, même s’il se mesure en fractions de seconde, fournit une donnée essentielle pour calculer la distance exacte séparant le capteur de l’objet.
Cette mesure est possible grâce à la connaissance de la vitesse à laquelle le signal se déplace. En effet, on peut prendre ces indications comme exemple :
- 330m/S s’il s’agit d’un signal sonore dans l’air ou encore
- 300.000km/s pour un signal lumineux dans l’air (Le paragraphe suivant aborde plus en détail ces aspects)
Quels avantages à l'utilisation des infra-rouges pour les capteurs de distance ?

Chez BLUEGRioT, l’usage de la technologie infrarouge est courant, en particulier avec un composant de STMicroelectronics fréquemment désigné sous l’abréviation TOF, pour simplifier. Ces composants, faisant partie de la série VL53L, se distinguent par leur efficacité et leur avantage économique, leur prix étant inférieur à 5 dollars.
Avantages des VL53L :
- Flexibilité et précision : Ils se distinguent par leur capacité à ajuster l’angle de détection, offrant ainsi une grande flexibilité : ils peuvent être configurés pour cibler de manière très précise ou, au contraire, couvrir une zone plus large.
- Sélection de zones : Ces composants permettent de sélectionner spécifiquement des zones d’intérêt à surveiller tout en excluant d’autres zones non pertinentes.
- Encombrement réduit : Un autre atout majeur de ces composants est leur taille minimale, avec des dimensions de seulement 5mm x 2,5mm. Cela les rend particulièrement avantageux par rapport à des systèmes ultrasonores de mesure TOF, qui sont généralement plus encombrants.
- Communication intégrée : Ils intègrent également une interface de communication numérique, facilitant la connexion avec un microcontrôleur via i2C, par exemple. À l’inverse, un système à ultrasons nécessiterait un traitement spécifique et une électronique externe pour communiquer.
- Applications pratiques : Utilisés dans nos smartphones pour gérer l’autofocus des caméras, ou dans les drones pour mesurer la distance avec le sol pendant l’atterrissage, les VL53L ont fait leurs preuves et se sont vendus par milliards.

Toutefois, ils présentent certaines limites dans des conditions spécifiques. Comme ils reposent sur la technologie infrarouge, il est impératif que l’interface entre le capteur et son environnement extérieur reste claire. Si la lentille du capteur est obstruée par des matières qui bloquent la lumière, le composant perd sa capacité de détection et devient inopérant. Cela peut poser problème, par exemple, lors de la mesure du niveau de liquides opaques qui provoquent des éclaboussures.
L'utilisation de l'Ultrason
C’est face aux contraintes des infra-rouge, qu’il est intéressant d’explorer les de capteurs à ultrasons.
Certains capteurs ultrasons prêts à l’emploi sont disponibles sur le marché. Si vous vous intéressez à l’utilisation de l’ultrason pour mesurer une distance, vous avez probablement déjà rencontré le célèbre capteur ultrason HC-SR04, largement utilisé dans de nombreux projets Arduino. Cependant, ce module est loin de répondre aux exigences d’un projet industriel.
Cela dit, il peut servir de point de départ pour aborder le sujet. Voici ce que nous pouvons observer

Le capteur ultrason est constitué de deux composants majeurs, nommés « transducteurs céramiques ultrasoniques« . Le premier doit être stimulé à une fréquence de 40 kHz pour générer un signal ultrasonore, tandis que le rôle du second est de recevoir l’écho de ce signal.
Il est essentiel de mentionner une différence notable entre ce module ultrasonique HC-SR04 et le capteur infrarouge VL53L, en particulier en ce qui concerne leur interaction avec les obstacles physiques. Pour illustrer, imaginons l’installation d’une vitre protectrice devant le capteur. Dans le cas de l’ultrason, cet obstacle bloquerait totalement le signal sonore, nuisant ainsi au bon fonctionnement du capteur. En revanche, le capteur infrarouge serait capable de fonctionner malgré la présence de la vitre.
Toutefois, le capteur ultrason présente des alternatives intéressantes ; des transducteurs spécifiques sont conçus pour surmonter ces défis, offrant ainsi une flexibilité accrue dans certaines applications.
Mesure par ultrason : Fiabilité et Applications Avancées
Cette technologie ultrason va au-delà de la mesure de distances en présence d’obstacles dans l’air ; elle est également efficace avec les solides et les liquides. Qu’il s’agisse de déterminer l’épaisseur d’un bloc de bois ou de mesurer un volume d’eau, l’ultrason enregistre et renvoie des échos à chaque interface de matériaux, offrant ainsi une polyvalence avantageuse par rapport à l’infrarouge dans ces situations.
Cependant, avant de discuter des avantages de cette technologie, il convient de mentionner son application dans l’électronique embarquée et, plus largement, dans les objets connectés. À l’opposé des capteurs optiques VL53L de petite taille, les capteurs ultrason packagés et prêts à l’emploi rencontrent des difficultés d’intégration dans des objets connectés souvent compacts. Leur taille dépasse celle des 5mm du VL53L, les coûts sont plus élevés et les angles de détection sont habituellement supérieurs à 70° (contre 20° pour le VL53L), ce qui restreint leur utilisation. Ainsi, sans un espace conséquent dans la conception du produit et un budget adapté, le capteur ultrason packagé pourrait ne pas être le choix approprié.
Le principal enjeu ne réside pas tant dans la technologie elle-même mais dans son intégration. La solution semble alors être la création personnalisée d’un capteur ultrason, en séparant ses composantes pour les intégrer de façon optimale à l’objet visé
Et si nous faisions un capteur ultrason nous-même ?
L’un des premiers éléments notables dans la création d’un capteur ultrason sur mesure concerne le choix de la fréquence. Ce choix dépend des distances à mesurer ainsi que du milieu d’application, qu’il s’agisse de l’air, de l’eau ou de solides. Bien que de nombreuses études traitent de ce sujet, l’expérience directe reste irremplaçable.
Le processus implique la modification de la fréquence d’excitation du matériau piézoélectrique ; cependant, il est également crucial de sélectionner un matériau piézoélectrique qui résonne précisément à cette fréquence. Trouver les cellules piézoélectriques adaptées peut s’avérer complexe. Les fréquences que nous avons explorées incluent :
- 100 kHz
- 200 kHz
- 300 kHz
- 400 kHz.
Comment les fréquences doivent varier selon les distances ?
Jouer avec la fréquence des ondes ultrasonores, c’est un peu comme déverrouiller un univers de possibilités, où chaque petit réglage trouve son écho dans une utilisation bien spécifique. Imaginez passer à travers le métal ou la glace sans même la briser, c’est là toute la magie des capteurs ultrasons. En ajustant finement les fréquences, le flux d’énergie et le rythme des impulsions, on a réussi à pousser plus loin leur portée et à affiner leur acuité. C’est le genre d’outil qui nous entoure de plus en plus, comme le démontre l’exemple de l’échographie.
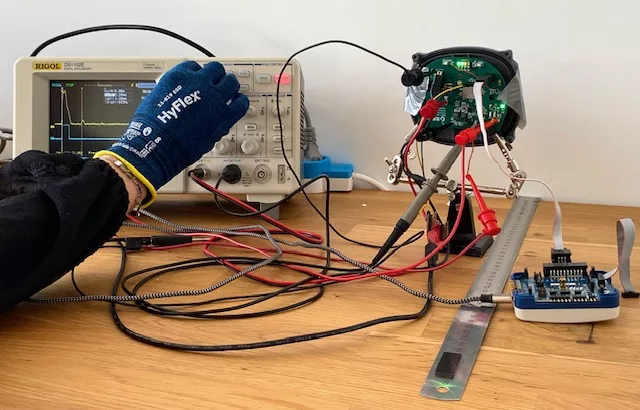
Durant nos expérimentations, nous avons connecté une cellule capable à la fois de transmettre et de recevoir, dans l’attente de capturer l’écho. Nous avons réussi à mesurer des distances correctes, allant de quelques centimètres à une dizaine de centimètres, mais sans parvenir à obtenir des mesures inférieures.
Pour une fréquence de 100 kHz, la mesure minimale était de 10 cm, et pour 200 kHz, elle ne descendait pas en dessous de 20 cm, et ainsi de suite. La raison de cette limitation est la suivante : au moment où l’onde est émise vers la cible, elle revient déjà, alors que la cellule est encore en phase d’émission et non de réception.
On peut faire une analogie avec le fait de lancer une balle contre un mur : si vous lancez une balle et que le mur est tellement proche que la balle rebondit et passe derrière vous avant même que vous ayez le temps de vous retourner pour la rattraper. Si, cependant, vous aviez un ami à vos côtés prêt à attraper la balle sans s’occuper de la lancer, les chances de réussite seraient bien meilleures.
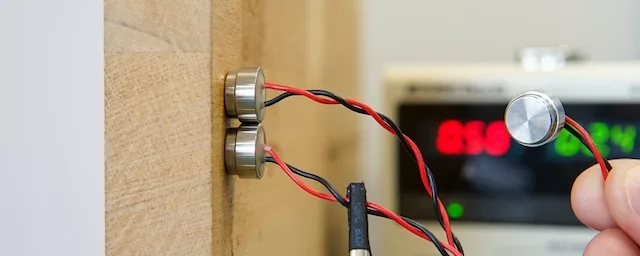
Appliquons cette idée à l’ultrason en ajoutant une deuxième cellule dédiée uniquement à la réception de l’écho.
L’intégration de la seconde cellule Piezzo !
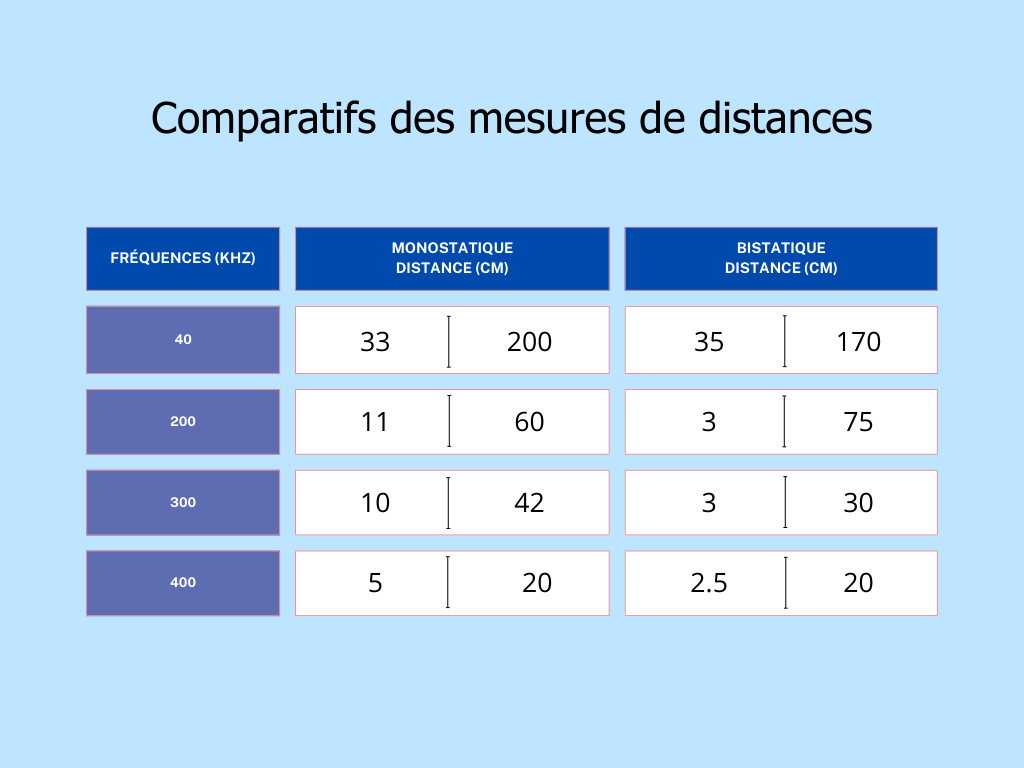
L’introduction d’une seconde cellule piézoélectrique a conduit à une série de tests révélateurs, dont les résultats soulignent l’amélioration de la performance des mesures de distance. Les tests ont démontré une amélioration notable de la précision sur une gamme étendue de distances, avec des observations particulières comme suit :
Nos tests ont révélé des mesures prometteuses, avec une précision accrue sur des distances allant de quelques centimètres à une trentaine. Voici une synthèse des résultats :
- À une distance réelle de 5cm, nous avons observé une mesure de 5.5cm, indiquant une légère surestimation mais restant dans une marge d’erreur acceptable.
- Pour des distances de 10cm et 20cm, les résultats ont continué à montrer une fidélité remarquable, avec des écarts minimes par rapport aux distances réelles.
- À 30cm, le système a mesuré 32.1cm, révélant une tendance à la surestimation qui s’accentue avec l’augmentation de la distance.
Quels sont les réels avantages de la bistatique ?
L’adoption d’une configuration bistatique distingue nettement les fonctions d’émission et de réception du signal ultrasonore, attribuées à deux cellules séparées. Cette séparation optimise le processus de mesure en éliminant les interférences potentielles, un problème courant dans les systèmes monostatiques où une unique cellule gère les deux fonctions. L’utilisation de deux cellules piézoélectriques améliore la précision des mesures, surtout sur des distances courtes à moyennes, grâce à la réduction du temps de latence entre l’émission et la réception du signal.
Contrairement au système monostatique, où le délai de bascule de la cellule peut entraîner la perte de signaux d’écho de cibles proches, la cellule dédiée à la réception dans une configuration bistatique est prête à capturer l’écho immédiatement après son émission, facilitant ainsi une détection plus rapide et précise.
Ensuite, cette approche réduit le risque de saturation du récepteur par le signal émis, un phénomène qui peut brouiller la détection des échos faibles ou des signaux de cibles éloignées. En séparant physiquement les sources d’émission et de réception, on diminue l’intensité du signal direct qui pourrait autrement submerger le récepteur, améliorant ainsi la sensibilité du système aux échos faibles.
Enfin, l’usage de deux cellules permet une plus grande flexibilité dans le design du capteur, offrant la possibilité d’ajuster indépendamment les caractéristiques d’émission et de réception pour s’adapter à diverses conditions de mesure et types d’application. Que ce soit pour augmenter la portée, améliorer la précision ou réduire le bruit ambiant, cette modularité constitue un atout majeur pour répondre aux exigences spécifiques de chaque cas d’usage.
On en déduit que l’adoption d’une seconde cellule piézoélectrique dans les dispositifs de mesure par ultrasons représente un progrès majeur, améliorant significativement la précision, la fiabilité et l’adaptabilité des mesures. Cette stratégie bistatique surmonte efficacement les contraintes associées aux systèmes monostatiques classiques, élargissant ainsi le champ des possibles en termes d’applications et optimisant l’utilisation de la technologie ultrasonique.
Techniques de mesure de distance alternatives et spécifiques
En plus des méthodes traditionnelles, diverses technologies offrent la possibilité de détecter la proximité d’objets, chacune présentant des caractéristiques uniques :
- Capteurs à effet Hall : Ils quantifient la magnitude du champ électromagnétique produit par un aimant. En interprétant ces mesures, on peut inférer la proximité par rapport à un aimant, ce qui permet une évaluation indirecte de la distance.
- Mesure de distance par signal radio : Une approche moins prévisible se fonde sur l’analyse de la force d’un signal radio reçu, à l’instar d’un récepteur Bluetooth identifiant des balises. La distance est déduite de l’intensité des signaux radio (RSSI). Néanmoins, cette méthode peut être affectée par des erreurs dues à des interférences et des réflexions d’ondes, rendant les estimations inexactes.
- Capteurs de fin de course : La solution la plus élémentaire et directe pour mesurer la distance. Ce type de capteur se limite à déterminer l’existence ou l’absence de contact, offrant ainsi une réponse binaire : présence ou absence. Cette technique est particulièrement adaptée à des situations nécessitant uniquement de détecter une proximité immédiate.
Chaque technique possède ses propres atouts et contraintes, proposant des alternatives diverses en fonction de la précision requise et du contexte d’utilisation.